Throughout my career, I’ve had the privilege of working on terrestrial and space robotics that span the waterways of Singapore to an Alaskan Glacier, and the surface of Mars. Below you’ll find a short selection of these projects.


Mars Sample Recovery Helicopter Manipulation System
2023 | JPL
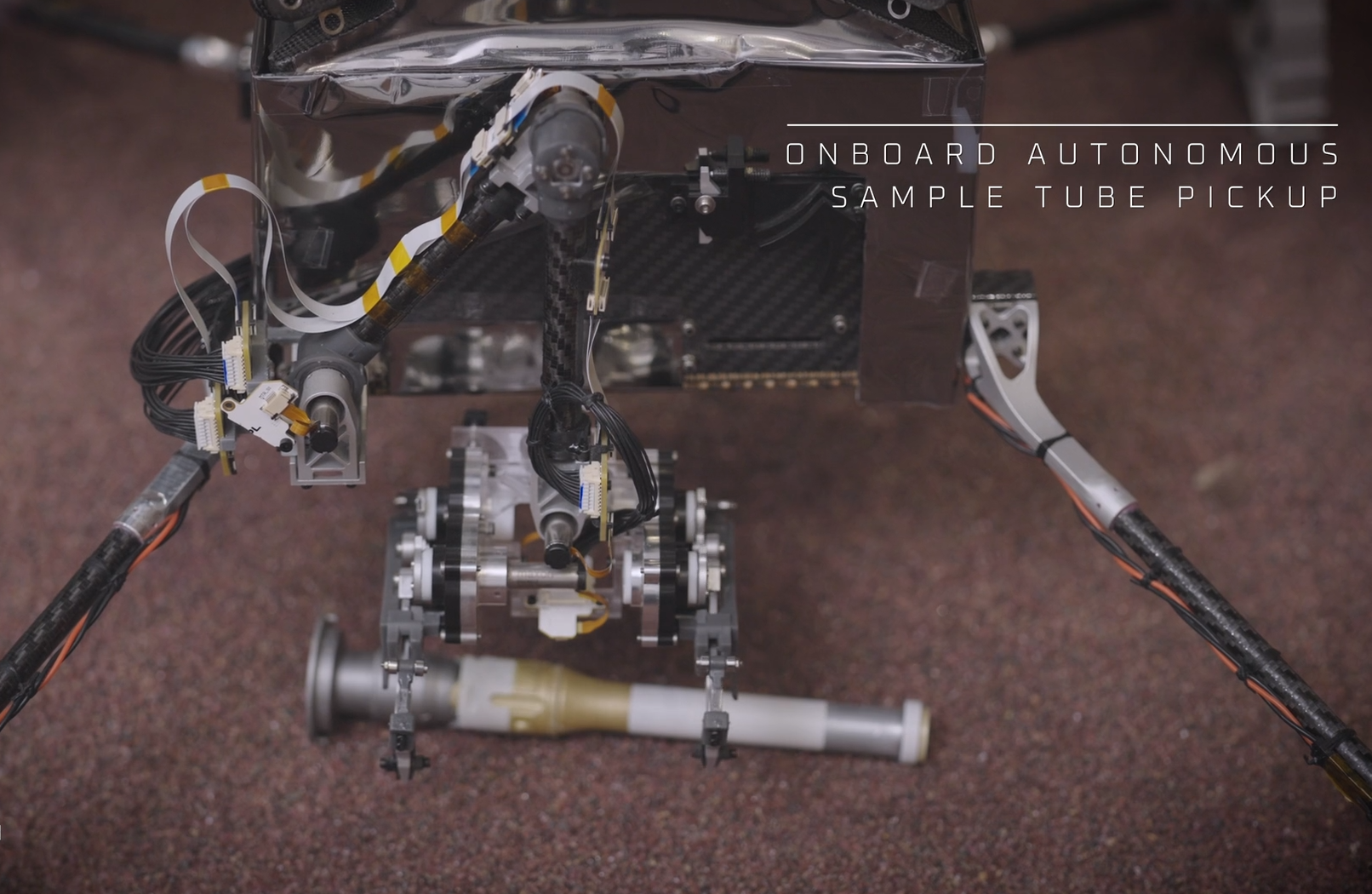
As the cognizant engineer and manipulation lead for NASA’s Sample Recovery Helicopter project, I was brought in to push a ultra light weight precision manipulation system from napkin sketch to working prototype—on an aggressive four-month timeline. We started with a concept at PDR and presented a design that met the precision grasping requirements under uncertain terrain. My role spanned design of 20-gram actuators, adaptive grasping mechanisms, flight system integration, and tight coordination with autonomy, perception, and mobility teams. We were tasked with designing a manipulation system that could fly on Mars, and we delivered.
After PDR, we pulled together a working prototype in under 4 months. The demonstration prototype came in within 50g of the system’s 200g mass allocation and was successfully integrated onto a flying and driving capable prototype vehicle. With this unit, we successfully demonstrated mobile manipulation and sample recovery—proof that robotic manipulation hosted on aerial platforms is viable on Mars.


Europa Lander Field Sampling Campaign
2020 - 2022 | JPL
To prepare for the realities of a Europa surface mission, I led the development and field demonstration of an autonomous robotic sampling system engineered to operate in analog glacial ice environments. At the core was a custom-built robotic arm—RiNG—designed with high dexterity, 500N tooling force, proprioceptive sensing, and modular ice sampling tools. After development and validation in a lab, the hardware and software systems were validated on Alaska’s Matanuska Glacier. There we ran a multi-week field campaign under real-world mission constraints: freezing temps, shifting terrain, and no second chances. We tested autonomous sampling behaviors, tool interactions, and failure recovery modes against ice, melt pools, and fractured rock—validating the kind of reactive autonomy future planetary missions will need.
In addition to leading the design of the robotic sampling hardware, I spearheaded the 3 week field campaign with a team of 15 engineers and scientists. This campaign followed over a year of prep integrating autonomy, science, and engineering goals. It was Europa science rehearsal at full scale—grueling moraine hikes, perilous helicopter lifts, and a ruggedized robotic arm autonomously sampling glacial ice on the windswept Alaskan frontier.



Curiosity Mars Rover Planner Ops
2013 - 2020 | JPL
For six years, I helped drive a one-ton nuclear-powered robot across the surface of Mars. As a member—and later lead—of the Curiosity Rover Planning team at JPL, I was responsible for designing and executing daily mobility and manipulation plans to navigate some of the most geologically rich (and mechanically punishing) terrain in Gale Crater. I translated orbital data, terrain models, and science priorities into centimeter-accurate drive commands, leveraging software-in-the-loop simulations, and 3D visualization suites tailored for tactical analysis. In addition to a regular team member, and team lead, I spend time as a strategic route planning specialists. For this role, I expanded my view to authored multi-kilometer mobility campaigns spanning months to years—balancing scientific targets with terrain types, mobility performance limits, and vehicle aging.
When the COVID-19 pandemic hit, I led the Rover Planner team’s transition to fully remote operations, an effort documented in our 2021 IEEE paper "Commanding Curiosity from the Couch." We re-architected planning workflows, shifted mission-critical ops to home networks, and built out redundancy in tactical planning roles—all while keeping Curiosity moving through a scientifically dense stretch of terrain. That experience cemented my belief in resilient autonomy—not just in the machines we send off-world, but in the teams who operate them across time zones, laptops, and uncertain ground.

Credits: NASA/JPL-Caltech/MSSS


Autonomous Kayaks
2012 | MIT | Singapore
When you're chasing dynamic, high-gradient features like industrial effluent jets in coastal zones, guess-and-check science doesn't cut it. My master’s thesis tackled this challenge by building a full-stack adaptive sampling framework using fleets of autonomous surface kayaks. Working within the MOOS-IvP autonomy architecture, I developed new estimation and control algorithms that let these robots detect and react to thermal and salinity gradients in real time. The system fused onboard salinity, temp, and ADCP velocity flow data to estimate jet field parameters on the fly and direct autonomous transects toward regions of highest information gain—no operator intervention required.
I also designed a custom pan-tilt ADCP system to overcome the constraints of fixed-mount sensors, enabling precise 3D velocity mapping without moving the vehicle itself. This expanded both the spatial awareness and operational safety of the fleet in tight, industrial marine environments. From modeling the physics of buoyant jets to deploying real robots in Singapore’s harbors, the work reflects a systems-level approach to autonomy in field robotics—one that balances real-time adaptivity with rigorous environmental modeling.